


This book provides a hands-on introduction to Controller Area Network (CAN) bus technology through practical projects using the Arduino Uno and the Raspberry Pi 4. By working with readily available CAN bus interface modules, readers learn how to design, build, debug, and test CAN-based systems without the need for specialized or expensive equipment. The project-driven approach emphasizes real-world applications, making abstract concepts tangible and easier to understand. Step by step, the book guides readers from basic CAN bus principles to fully functioning multi-node networks, showing how common development platforms can be effectively used to explore professional-grade communication systems.
 Written for students, practicing engineers, and technically curious enthusiasts, the book assumes a basic understanding of electronics and benefits from some familiarity with the C and Python programming languages. Experience with the Arduino IDE and Raspberry Pi development environments is helpful, particularly for readers who plan to build their own microcontroller-based CAN applications.
Written for students, practicing engineers, and technically curious enthusiasts, the book assumes a basic understanding of electronics and benefits from some familiarity with the C and Python programming languages. Experience with the Arduino IDE and Raspberry Pi development environments is helpful, particularly for readers who plan to build their own microcontroller-based CAN applications.
In addition to serving as a tutorial, the book is designed as a long-term reference, addressing key questions such as which bus systems are used in the automotive industry, how the CAN bus operates at a physical and protocol level, how CAN frames are structured, and how errors are detected and handled. It explains the role of CAN controllers, including practical use of the MCP2515, and walks through the creation of two-node and three-node CAN networks using both Arduino Uno and Raspberry Pi platforms.
Topics such as acceptance masks, acceptance filters, and CAN bus data analysis are covered in detail, making the book a valuable resource for anyone seeking a deeper, practical understanding of CAN bus systems and their applications. More information…
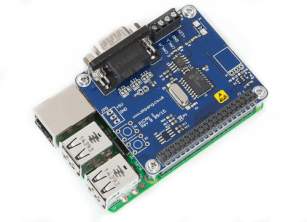 PiCAN 2 – CAN Bus Interface for Raspberry Pi
PiCAN 2 – CAN Bus Interface for Raspberry Pi
The PiCAN 2 CAN Bus Interface for Raspberry Pi is an expansion board that adds full Controller Area Network (CAN) capability to Raspberry Pi single-board computers. Designed to plug directly onto the Raspberry Pi GPIO header, it integrates a dedicated CAN controller and transceiver to support standard and extended CAN 2.0 frames at data rates of up to 1 Mb/s. The board connects to the Raspberry Pi via the SPI interface and, when used with Linux and SocketCAN, appears as a native network interface. This allows applications written in C, Python, or other languages to send, receive, and analyze CAN messages using standard networking tools and libraries.
The PiCAN 2 is well suited for automotive, industrial, and embedded development projects that require reliable CAN communication. It provides convenient connection options such as a DB9 connector and screw terminals, making it easy to interface with vehicle networks, test benches, or custom CAN systems. Features like onboard CAN termination and straightforward configuration simplify setup and improve network stability. Suitable for hobbyists, students, and professional engineers alike, the PiCAN 2 offers a practical and cost-effective way to integrate CAN bus functionality into Raspberry Pi–based systems for learning, prototyping, diagnostics, and data logging. More information…








Comments are closed.